Como as PMEs podem usar um metaverso industrial para explorar e implantar soluções robóticas rapidamente
Contributed By DigiKey's North American Editors
2024-11-21
Os robôs e os robôs colaborativos (cobots) estão na vanguarda das tecnologias de automação de fábrica. Os gêmeos digitais e a realidade virtual (VR) estão na vanguarda das ferramentas de projeto e desenvolvimento. Combinados, eles podem ser aproveitados para criar um metaverso industrial que proporciona maior produtividade com mais rapidez, mesmo para pequenas e médias empresas (PMEs).
Os projetistas de PMEs podem se beneficiar de uma interface simples e intuitiva que combina um gêmeo digital, um modelo virtual altamente detalhado de um objeto físico, como um robô delta, linear ou de vários eixos, e um ambiente de realidade virtual tridimensional (3D) para permitir a execução direta e a verificação das sequências de movimento do robô.
O uso desses recursos dá suporte ao ajuste fino e à otimização do sistema de automação, mesmo sem nenhum hardware físico, e permite a exploração rápida de várias possibilidades de solução.
Este artigo analisa primeiramente a distinção entre um gêmeo digital matemático, descrito por dados, e um gêmeo digital visual (gêmeo VR) e como ambos são necessários para criar o metaverso industrial. Em seguida, apresenta um sistema de controle de robô e o software relacionado da Igus que pode ser usado para simular um robô em uma interface 3D (gêmeo digital visual) sem usar nenhum hardware físico, juntamente com robôs delta, lineares e de vários eixos compatíveis que podem ser usados para realizar a solução otimizada.
Os gêmeos digitais e a VR são tecnologias complementares que usam diferentes formas de visualização, interações e hardware. Os gêmeos digitais são modelos baseados em dados de objetos físicos, sistemas ou processos. Eles são projetados para serem usados durante todo o ciclo de vida do item que está sendo modelado, desde a concepção inicial até o descomissionamento e a reciclagem.
A VR é uma tecnologia imersiva e visual que também usa modelos digitais. Em um ambiente de VR, é possível simular as relações e interações entre objetos, como um robô executando uma tarefa. Portanto, embora ambas as tecnologias possam ser usadas para projeto e simulação, a tecnologia de gêmeos digitais se concentra nas considerações gerais do ciclo de vida, enquanto a VR se concentra nas interações entre objetos físicos.
Um metaverso combina gêmeos digitais e VR em um ambiente virtual criado para fins específicos que oferece suporte a interações em tempo real entre os objetos digitais e as pessoas. É frequentemente associado a jogos, mas está sendo cada vez mais aplicado a atividades comerciais e industriais.
Bem-vindo ao iguverse
A Igus desenvolveu o metaverso iguverse para dar suporte a interações de engenharia em ambientes industriais, como o desenvolvimento e a implantação de sistemas robóticos. O iguverse pode ser implementado por meio do software Igus Robot Control (iRC). Esse aplicativo gratuito e sem licença permite que os usuários controlem vários tipos de robôs, inclusive robôs delta, cobots (braços de robô) e robôs de pórtico.
Ele oferece aos usuários uma interface 3D e mais de 100 programas de amostra. Os requisitos de sistema para implementar o iRC incluem um PC (mínimo de uma CPU Intel i5) com Windows 10 ou 11 (64 bits) com 500 MB de espaço livre em disco e conectividade de rede Ethernet ou sem fio.
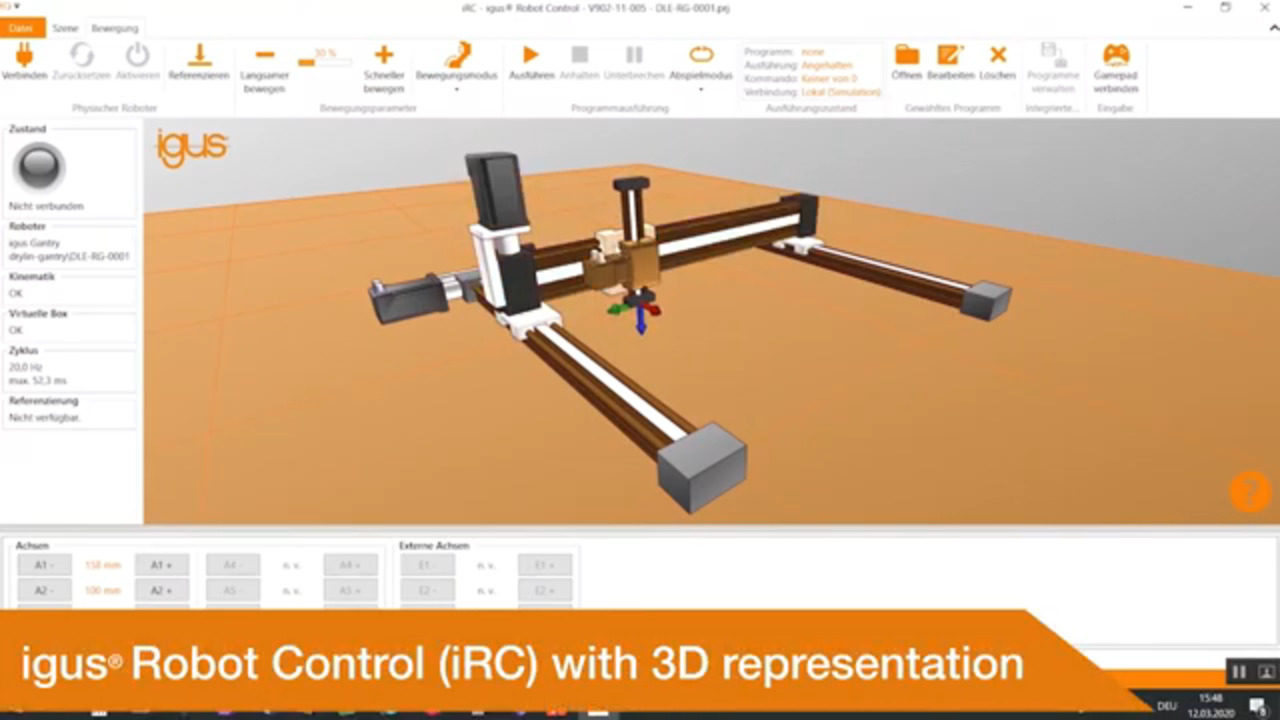
O núcleo do software é um gêmeo digital 3D do robô que está sendo programado. Um exemplo disso é um robô de pórtico linear de três eixos, como o modelo DLE-RG-0001-AC-500-500-100, com um espaço de trabalho de 500 x 500 x 100 mm, ou um atuador xy de dois eixos, como o modelo DLE-LG-0012-AC-800-500, com um espaço de trabalho de 800 x 500 mm (Figura 1). Os projetistas podem definir movimentos com alguns cliques do mouse e usar o modelo 3D para garantir que os movimentos necessários sejam viáveis, mesmo antes de comprar o robô.
 Figura 1: Exemplo de um gêmeo digital 3D VR de um robô de pórtico de três eixos no iguverse. (Fonte da imagem: Igus)
Figura 1: Exemplo de um gêmeo digital 3D VR de um robô de pórtico de três eixos no iguverse. (Fonte da imagem: Igus)
Além do software iRC, o controlador do robô é um elemento fundamental no ambiente de desenvolvimento do iguverse. Por exemplo, o modelo IRC-LG12-02000 é para motores de 48 V, tem sete entradas e sete saídas e um cabo de 10 m para conexão com o robô. Os controladores IRC incluem módulos de acionamento de motor para vários tamanhos de motores de passo bipolares e estão disponíveis configuráveis ou pré-configurados. Ele também tem várias interfaces para integração de sistemas, incluindo:
- Interface de controlador lógico programável (CLP) para controle por meio de entradas e saídas digitais, especialmente para facilitar a inicialização e a interrupção de programas por meio de um CLP ou botão de pressão
- Interface Modbus TCP para controle por meio de um CLP ou PC
- Common Robotic Interface (CRI) Ethernet para controle e configuração usando um CLP ou PC
- Interface do sistema operacional do robô (ROS) para operar o robô usando o ROS
- Interface para câmeras de detecção de objetos
- Interface de nuvem para monitorar remotamente o estado do robô
Cinemática suportada
Uma variedade de cinemática (movimentos básicos) que define o movimento controlado do robô é suportada no iguverse. Além da cinemática pré-configurada, é possível configurar até três outros eixos cinemáticos independentes no IRC. A cinemática pré-configurada inclui:
- Robôs delta de 2 e 3 eixos
- Robôs de pórtico,
- 2 eixos (eixos X e Y)
- 2 eixos (eixos Y e Z)
- 3 eixos (eixos X, Y e Z)
- Braços de robôs (cobots),
- 3 eixos (eixos 1, 2, 3)
- 3 eixos (eixos 2, 3, 4)
- 4 eixos (eixos 1, 2, 3, 4)
- 4 eixos (eixos 2, 3, 4, 5)
- 5 eixos (eixo 1 a 5)
- 6 eixos (eixo 1 a 6)
- Robô SCARA de 4 eixos
Fácil programação para automação de baixo custo
Os robôs Igus e o IRC foram projetados para suportar a automação de baixo custo. Isso não seria possível sem uma interface de programação fácil de usar. Um mouse de 3 botões ou um gamepad pode mover e posicionar um robô no iguverse. Com o software IRC, o usuário pode mover livremente todos os eixos do gêmeo digital na interface 3D. Uma função de aprendizagem dá suporte ao desenvolvimento de software de controle de robôs, mesmo sem um robô físico conectado.
Para implementar a aprendizagem, o usuário move manualmente o robô virtual para a posição necessária e define como ele se move até lá. O processo é repetido até que o perfil de movimento completo tenha sido criado. O centro de ferramentas no software IRC permite que os usuários adicionem efetuadores finais correspondentes, como garras, de forma fácil e ajusta automaticamente o ponto central da ferramenta no robô. Além disso, é possível adicionar uma conexão a um sistema de controle industrial de nível superior.
O processo começa com a ativação do robô, usando os botões "conectar", "reiniciar" e "ativar", conforme necessário na interface. O LED de status do IRC deve ficar verde e o status deve indicar "Sem erro”. O perfil de movimento pode agora ser inserido usando a aba "Jogging" (Figura 2).
 in the iguverse immersive development environment (click to enlarge)") Figura 2: A aba "Jogging" (canto inferior esquerdo) no ambiente de desenvolvimento imersivo do iguverse pode ser usada para inserir perfis de movimento. (Fonte da imagem: Igus)
Figura 2: A aba "Jogging" (canto inferior esquerdo) no ambiente de desenvolvimento imersivo do iguverse pode ser usada para inserir perfis de movimento. (Fonte da imagem: Igus)
Robôs de pórtico
Os robôs de pórtico, como os incluídos nos exemplos anteriores do iguverse, consistem em dois eixos X básicos, um eixo Y e um eixo Z opcional. O eixo Y está ligado aos dois eixos X paralelos e se move para frente e para trás no espaço bidimensional. O eixo Z opcional dá suporte uma terceira dimensão de movimento.
Os robôs de pórtico da Igus têm forros plásticos autolubrificantes que deslizam e rolam de forma mais suave e silenciosa do que os designs tradicionais baseados em rolamentos de esferas. O novo design é mais leve, resistente à corrosão e livre de manutenção, qualidades importantes para as PMEs. Também crucial para as PMEs, esses robôs custam até 40% menos do que os robôs de pórtico tradicionais, proporcionando um retorno sobre o investimento (ROI) mais rápido.
Esses robôs são adequados para duas classes de aplicações: baixas velocidades com grandes cargas ou altas velocidades com pequenas cargas. As aplicações representativas incluem operações de embalagem, pick-and-place, etiquetagem, manuseio de materiais e montagem.
Eles são oferecidos em uma variedade de tamanhos. Os acessórios disponíveis incluem acoplamentos, efetuadores finais e flanges de motor. Exemplos de robôs de pórtico de tamanho médio incluem:
- O DLE-FG-0006-AC-650-650 é um pórtico plano bidimensional com uma área de trabalho de 650 x 650 mm. Esse robô pode manusear cargas úteis de até 8 kg e tem uma taxa dinâmica de até 20 coletas por minuto.
- O DLE-RG-0012-AC-800-800-500 é um pórtico tridimensional com um espaço de trabalho de 800 x 800 x 500 mm. Ele pode manusear cargas úteis de até 10 kg com uma taxa dinâmica de até 20 coletas por minuto.
Proeza da paletização
A paletização de produtos para expedição é uma atividade cotidiana nas operações de fabricação e logística. O mais novo e maior membro do iguverse é o robô de pórtico grande XXL, com um espaço de trabalho de 2.000 x 2.000 x 1.500 mm, adequado para aplicações de paletização de até 10 kg. Estão disponíveis designs personalizados com espaços de trabalho de até 6.000 x 6.000 x 1.500 mm.
Esses robôs de pórtico podem pegar peças com peso de até 10 kg, transportá-las a uma velocidade de até 500 mm/s e colocá-las em um palete com uma repetibilidade de 0,8 mm (Figura 3). A solução de robô de paletização da Igus custa até 60% menos do que sistemas comparáveis.
 Figura 3: A paletização é uma atividade comum e importante nas operações de fabricação e logística e pode ser automatizada usando um robô de pórtico. (Fonte da imagem: Igus)
Figura 3: A paletização é uma atividade comum e importante nas operações de fabricação e logística e pode ser automatizada usando um robô de pórtico. (Fonte da imagem: Igus)
Robôs Delta
Assim como os robôs de pórtico, os robôs delta estão disponíveis com dois ou três eixos. Os robôs Delta têm um área de alcance em forma de cúpula, montada acima da área de trabalho. Eles têm velocidades excepcionalmente altas e são frequentemente usados para manuseio de materiais e colocação de peças. Exemplos de robôs delta da Igus incluem:
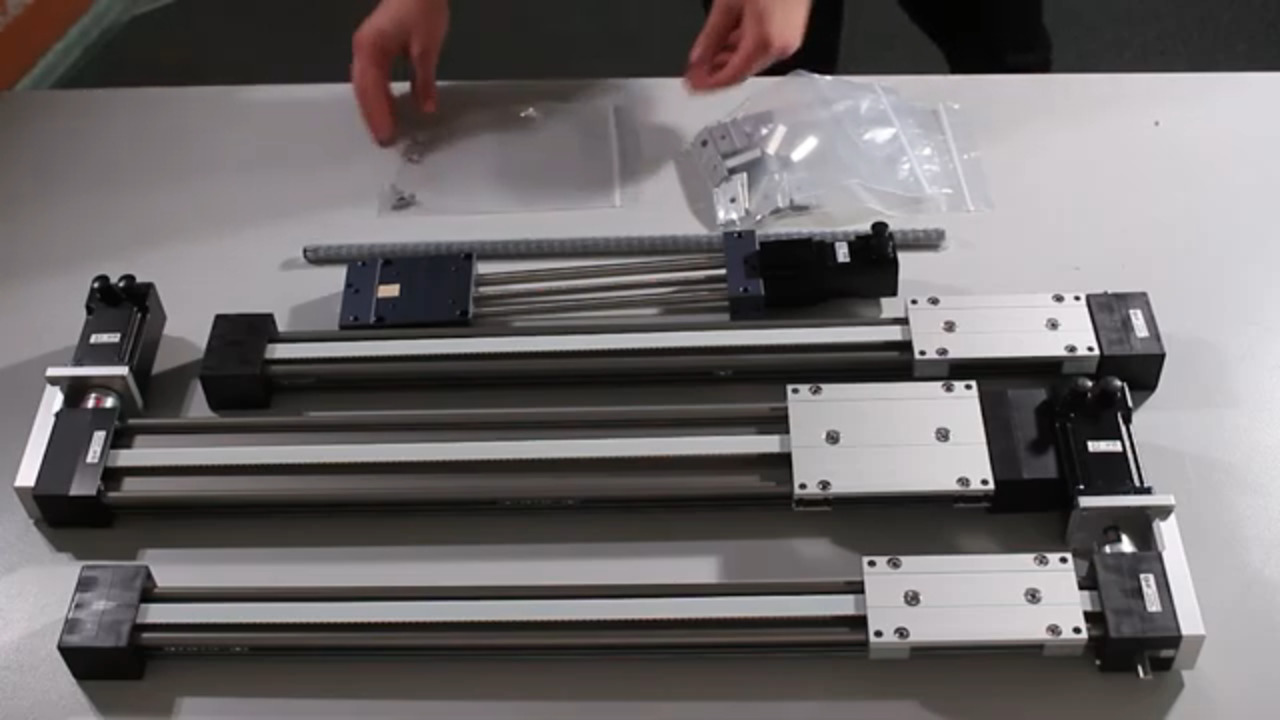
- O RBTX-IGUS-0047 é um design de três eixos com um diâmetro do espaço de trabalho de 660 mm. Ele tem uma precisão de ±0,5 mm, uma carga útil máxima de 5 kg, uma velocidade máxima de 0,7 m/s e pode realizar até 30 coletas por minuto. (Figura 4).
- O RBTX-IGUS-0059 é um design de 2 eixos com um diâmetro do espaço de trabalho de 700 mm. Ele também tem uma precisão de ±0,5 mm. Sua carga útil máxima é de 5 kg, sua velocidade máxima é de 2 m/s e ele pode realizar até 50 coletas por minuto.
 Figura 4: Exemplo de um robô delta de três eixos ao lado de um Igus iRC (esquerda). (Fonte da imagem: DigiKey)
Figura 4: Exemplo de um robô delta de três eixos ao lado de um Igus iRC (esquerda). (Fonte da imagem: DigiKey)
Cobots de braço articulado
O iguverse também suporta cobots com braços articulados. Os cobots podem ter de dois a 10 ou mais eixos, também chamados de graus de liberdade (DOF). Em geral, eles têm grandes áreas de alcance e podem executar tarefas complexas em colaboração com uma pessoa. O modelo REBEL-6DOF-02 da Igus tem 6 DOFs e o modelo REBEL-4DOF-02 tem 4 DOFs. Ambos têm uma precisão de ±1 mm, uma faixa de trabalho nominal de 400 mm e podem realizar um mínimo de 7 coletas por minuto com uma velocidade linear de 200 mm/s.
O modelo 6 DOF tem uma carga útil máxima de 2 kg e um alcance máximo de 664 mm. O modelo de 4 DOF tem uma carga útil máxima de 3 kg e um alcance máximo de 495 mm (Figura 5).
 and 6 DOF (right)") Figura 5: Cobots de braço articulado com 4 DOF (esquerda) e 6 DOF (direita). (Fonte da imagem: Igus)
Figura 5: Cobots de braço articulado com 4 DOF (esquerda) e 6 DOF (direita). (Fonte da imagem: Igus)
Resumo
O metaverso industrial imersivo da iguverse combina gêmeos digitais e VR para fornecer ferramentas que permitem o rápido desenvolvimento e a implantação de soluções robóticas. Ele é gratuito, sem licença e foi projetado para ser executado localmente em um PC sem conexão com a nuvem. Pode ser usado para desenvolver e testar soluções robóticas sem a presença de um robô.
Ele oferece suporte a uma ampla gama de cinemática em robôs delta, robôs de pórtico, braços de robô (cobots) e robôs SCARA. O IRC inclui uma série de interfaces para dar suporte às necessidades operacionais e de automação, incluindo interface CLP, Modbus TCP/IP, CRI Ethernet, interface ROS, uma interface para câmeras de detecção de objetos e uma interface de nuvem. O iguverse, o iRC e os robôs relacionados da Igus foram otimizados para atender às necessidades de automação de baixo custo das PMEs.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.