Selecionando opções de tecnologia de sensores de proximidade e distância
Contributed By DigiKey's North American Editors
2024-09-18
O uso de sensores de proximidade e distância para detectar a presença e a localização de itens sem contato físico pode ser um aspecto importante do controle de processos industriais, como manuseio de materiais, máquinas agrícolas, operações de fabricação e montagem e embalagens de alimentos, bebidas e produtos farmacêuticos.
Esses sensores estão disponíveis usando uma variedade de tecnologias, incluindo fotoelétrica, laser, indutiva, capacitiva, magnética e ultrassônica. Ao determinar a melhor opção para uma determinada aplicação, fatores como alcance, tamanho, precisão, sensibilidade, resolução e custo precisam ser considerados.
Um fator importante em muitas aplicações é o material do objeto a ser detectado. Alguns sensores se comportam de um jeito com superfícies duras e de outro com fibrosas, e outros sensores podem ser afetados pela cor ou pela refletividade do objeto.
Este artigo analisa as tecnologias dos sensores de proximidade sem contato comumente disponíveis, analisando como eles funcionam, suas características básicas de desempenho e os exemplos de sensores da SICK, juntamente com algumas aplicações pretendidas.
Sensores fotoelétricos
Os sensores fotoelétricos, como os sensores de proximidade fotoelétricos W10 da SICK, são simples de usar e instalar e estão disponíveis com uma variedade de recursos adequados para diversas aplicações. O projeto robusto dos sensores W10 os torna adequados para a detecção precisa de objetos em ambientes desafiadores. A tela sensível ao toque integrada acelera a configuração de parâmetros e a implementação do sensor (Figura 1).
 Figura 1: a tela sensível ao toque desses sensores fotoelétricos pode acelerar o comissionamento e a implementação. (Fonte da imagem: SICK)
Figura 1: a tela sensível ao toque desses sensores fotoelétricos pode acelerar o comissionamento e a implementação. (Fonte da imagem: SICK)
Grupos de instrução disponíveis permitem que os projetistas adaptem esses sensores aos requisitos de aplicações específicas. Além disso, as funções integradas, como configurações de velocidade, modos de medição padrão e de precisão e supressão de primeiro e segundo plano, tornam possível que um único sensor seja usado em uma variedade de aplicações. A série de sensores inclui quatro variantes, que diferem em suas distâncias de operação e opções de montagem.
Supressão de fundo
Os sensores de proximidade fotoelétricos com supressão de fundo (BGS) usam triangulação entre os elementos emissores e receptores. Os sinais de objetos atrás do alcance de detecção definido são suprimidos. Além disso, a tecnologia BGS da SICK ignora objetos altamente refletivos no plano de fundo e pode lidar com condições difíceis de iluminação ambiente.
A supressão de fundo é especialmente útil quando o objeto-alvo e o fundo (como uma correia transportadora) têm refletividade semelhante ou se a refletividade do fundo for variável e puder causar interferência na detecção.
Supressão de primeiro plano
Os sensores de proximidade fotoelétricos com supressão de primeiro plano (FGS) podem detectar objetos a uma distância definida. Todos os objetos entre o sensor e a distância de detecção (definida como plano de fundo) são detectados. Para garantir uma detecção confiável, o plano de fundo precisa ser relativamente claro e não deve variar em altura.
Quando os objetos estão em uma superfície reflexiva, como uma esteira transportadora branca ou de cor clara, a supressão de primeiro plano pode melhorar a detecção. Em vez de detectar a luz refletida pelo objeto, o sensor detecta o objeto pela ausência da luz refletida pela esteira transportadora.
Retrorrefletivo
Em um sensor retrorrefletivo, a luz emitida atinge um refletor, e a luz refletida é avaliada pelo sensor. Os erros podem ser minimizados com o uso de filtros polarizadores. Filmes extensíveis e embalagens plásticas transparentes podem interferir nesses sensores. A redução da sensibilidade do sensor pode ajudar a superar esses desafios. Além disso, a substituição dos emissores de luz infravermelha padrão por lasers pode permitir alcances de detecção mais longos e maior resolução.
O desempenho do sensor retrorrefletivo pode ser aprimorado com o uso de uma histerese de chaveamento menor do que a normal. Nesses projetos, até mesmo a atenuação mínima da luz entre o sensor e o refletor, por exemplo, causada por garrafas de vidro, pode ser detectada de forma confiável. A SICK também oferece um sistema de monitoramento chamado AutoAdapt, que regula e adapta continuamente o limite de chaveamento em resposta ao acúmulo gradual de contaminação que poderia levar à falha do sistema de detecção.
Feixe de passagem
Ao contrário dos sensores retrorrefletivos, os sensores de feixe de passagem usam dois dispositivos ativos: um emissor e um receptor. A detecção por feixe de passagem permite alcances de detecção mais longos. A substituição dos emissores infravermelho por diodos laser pode aumentar ainda mais a distância de detecção, mantendo a alta resolução e a detecção precisa.
Fibra óptica
Os sensores de fibra óptica são uma variação dos projetos de feixe de passagem. Em um sensor fotoelétrico de fibra óptica, o emissor e o receptor são encapsulados em uma única estrutura. Cabos de fibra óptica separados são usados pelo emissor e pelo receptor. Esses sensores são especialmente adequados para uso em aplicações de alta temperatura e em ambientes perigosos e agressivos.
Matrizes de sensores fotoelétricos
A família de sensores fotoelétricos RAY26 Reflex Array, como o modelo 1221950, permite a detecção confiável de objetos planos, bem como o rápido comissionamento. Quando combinados com um refletor, os sensores fotoelétricos também detectam objetos pequenos, planos, transparentes ou irregulares de até 3 mm. Em uma matriz de luz uniforme de 55 mm de altura, os sensores detectam a borda dianteira do objeto. Isso significa que até mesmo objetos perfurados podem ser detectados de forma confiável sem chaveamento complexo (Figura 4).
 Figura 2: as matrizes de sensores fotoelétricos podem detectar objetos de até 3 mm em um campo de 55 mm de altura. (Fonte da imagem: SICK)
Figura 2: as matrizes de sensores fotoelétricos podem detectar objetos de até 3 mm em um campo de 55 mm de altura. (Fonte da imagem: SICK)
Sensores de distância a laser
Os projetistas de aplicações como monitoramento de nível em contêineres de armazenamento, detecção de posição de objetos em transportadores, posição XY do eixo em sistemas automatizados de empilhadeiras, posicionamento vertical de guindastes em armazéns e transportadores aéreos e monitoramento de diâmetro durante o enrolamento de bobinas podem recorrer aos sensores de distância a laser DT50. Esses sensores suportam medições de distância por tempo de voo (ToF) de até vários metros usando luz laser refletida para oferecer imunidade à iluminação ambiente e operação precisa e confiável.
Por exemplo, o DT50-2B215252 tem um alcance de 200 a 30.000 mm e vários recursos especiais, incluindo:
- Caixa robusta com classificação de gabinete IP65 e IP67
- Pode fornecer até 3.000 medições de distância por segundo
- Tempo mínimo de resposta de 0,83 ms
- O invólucro compacto suporta uma variedade de aplicações, desde robôs industriais até a medição de alturas de enchimento de contêineres de armazenamento
Medições de alta resolução usando estatísticas
A medição de distância de alta definição + (HDDM+) é uma tecnologia de medição ToF de alta resolução que pode ser usada em sensores de distância a laser e de detecção e alcance de luz (LiDAR). Em contraste com as tecnologias de detecção de pulso único ou de correlação de fase, o HDDM+ é um processo de medição estatística.
O software do sensor avalia estatisticamente os ecos de vários pulsos de laser para filtrar a interferência de fontes como vidros, neblina, chuva, poeira, neve, folhas, cercas e outros objetos para calcular a distância até o alvo pretendido. A medição de distância resultante pode ter um alto nível de certeza, mesmo em condições ambientais desafiadoras (Figura 5).
 Figura 3: o software HDDM+ da SICK usa um processo de avaliação estatística para eliminar o "ruído" de itens como vidraças, neblina, chuva, poeira, neve, folhas e cercas. (Fonte da imagem: SICK)
Figura 3: o software HDDM+ da SICK usa um processo de avaliação estatística para eliminar o "ruído" de itens como vidraças, neblina, chuva, poeira, neve, folhas e cercas. (Fonte da imagem: SICK)
As aplicações típicas da tecnologia HDDM+ incluem medição de distância para controle de qualidade na produção de eletrônicos, detecção de objetos multidimensionais LiDAR e determinação de posição em engenharia mecânica e de instalações, além da determinação da posição de guindastes ou veículos industriais.
O alcance de detecção dos sensores HDDM+ é de até 1,5 km em fita retrorrefletiva. Por exemplo, o modelo DT1000-S11101 tem um alcance de até 460 m com uma precisão de medição típica de ±15 mm para objetos naturais e uma resolução ajustável de 0,001 a 100 mm.
Indutivo
Os sensores de proximidade indutivos, como a série IME da SICK, podem detectar objetos metálicos ferrosos e não ferrosos. Esses sensores consistem em um circuito ressonante de indutor-capacitor (LC) que gera um campo eletromagnético alternado de alta frequência. O campo é atenuado quando um objeto metálico entra na faixa de detecção. O amortecimento é detectado pelo circuito de avaliação de sinal e por um amplificador que produz o sinal de saída (Figura 4).
 Figura 4: um sensor de proximidade indutivo básico consiste em um circuito LC que produz um campo alternado, um avaliador de sinal e um amplificador. (Fonte da imagem: SICK)
Figura 4: um sensor de proximidade indutivo básico consiste em um circuito LC que produz um campo alternado, um avaliador de sinal e um amplificador. (Fonte da imagem: SICK)
Duas especificações importantes para a distância de detecção de várias tecnologias de sensores de proximidade são a distância de detecção nominal (Sn) e a distância de detecção segura (Sa). A Sn não considera as tolerâncias de fabricação nem as influências externas, como a temperatura de operação. A Sa leva em consideração as tolerâncias de fabricação e as variações nas condições operacionais. A Sa é normalmente cerca de 81% do valor da Sn. Por exemplo, para o sensor indutivo modelo IME08-02BPSZT0S, a Sn é de 2 mm e a Sa é de 1,62 mm.
Detecção capacitiva
Assim como os sensores indutivos, os sensores de proximidade capacitivos usam um oscilador. Nesse caso, é usado um capacitor aberto em que o eletrodo ativo no sensor produz um campo eletrostático em relação ao terra. Esses sensores podem detectar a presença de uma ampla variedade de materiais, incluindo objetos metálicos e não metálicos.
Quando um objeto entra no campo eletrostático, a amplitude das oscilações no circuito ressonante muda com base nas propriedades dielétricas do material. O avaliador de sinal detecta a alteração e um amplificador produz o sinal de saída (Figura 5).
 Figura 5: em um sensor de proximidade capacitivo, um circuito oscilador produz um campo eletrostático que muda de característica quando o alvo a ser detectado entra no campo. (Fonte da imagem: SICK)
Figura 5: em um sensor de proximidade capacitivo, um circuito oscilador produz um campo eletrostático que muda de característica quando o alvo a ser detectado entra no campo. (Fonte da imagem: SICK)
Assim como os sensores de proximidade indutivos, há várias especificações relacionadas à distância de detecção dos sensores de proximidade capacitivos, incluindo Sn, Sa e um fator de redução. Por exemplo, o modelo CM12-08EBP-KC1 tem uma Sn de 8 mm e uma Sa nominal de 5,76 mm.
O objeto a ser detectado deve ser pelo menos tão grande quanto a face do sensor e a distância de detecção varia de acordo com o fator de redução do material. Os fatores de redução estão relacionados à constante dielétrica do material e podem variar de 1 para metais e água a 0,4 para cloreto de polivinila (PVC), 0,6 para vidro e 0,5 para cerâmica.
Magnético
Os sensores de proximidade magnéticos respondem à presença de um ímã. Os sensores de proximidade magnéticos da SICK utilizam duas tecnologias de detecção:
- Os sensores magnetoresistivos gigantes (GMR) são baseados em resistores que alteram seu valor na presença de um campo magnético. Uma ponte de Wheatstone é usada para detectar a mudança na resistência e produzir um sinal de saída. Os sensores de cilindro MZT7, como o MZT7-03VPS-KP0 projetado para uso com cilindros de fenda T, usam a tecnologia GMR para detectar o posicionamento do pistão em acionamentos pneumáticos e em aplicações semelhantes.
- A tecnologia LC usa um circuito ressonante que ressoa com uma pequena amplitude. Se um campo magnético externo se aproximar, a amplitude ressonante aumenta. O aumento é detectado por um avaliador de sinal e um amplificador produz o sinal de saída (Figura 6). Por exemplo, o modelo MM08-60APO-ZUA tem uma Sn de 60 mm e uma Sa nominal de 48,6 mm.
 Figura 6: em um sensor de proximidade magnético, a sonda de campo pode usar a tecnologia GMR ou LC. (Fonte da imagem: SICK)
Figura 6: em um sensor de proximidade magnético, a sonda de campo pode usar a tecnologia GMR ou LC. (Fonte da imagem: SICK)
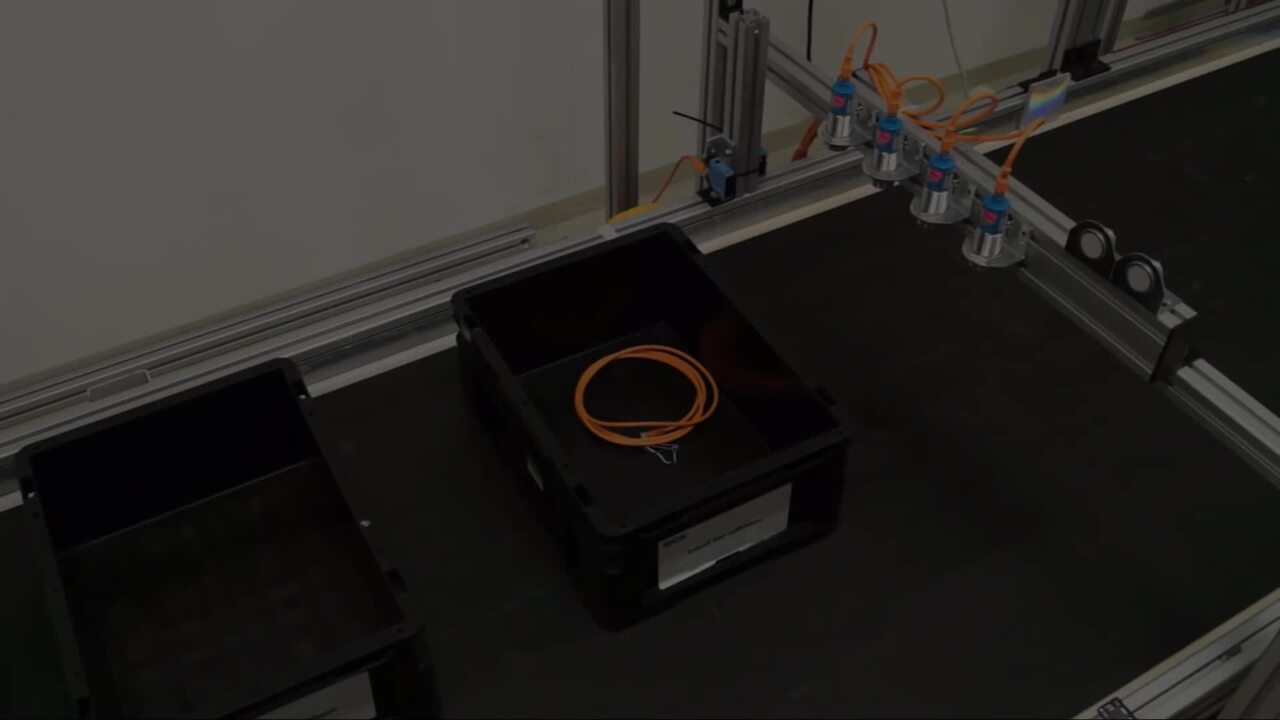
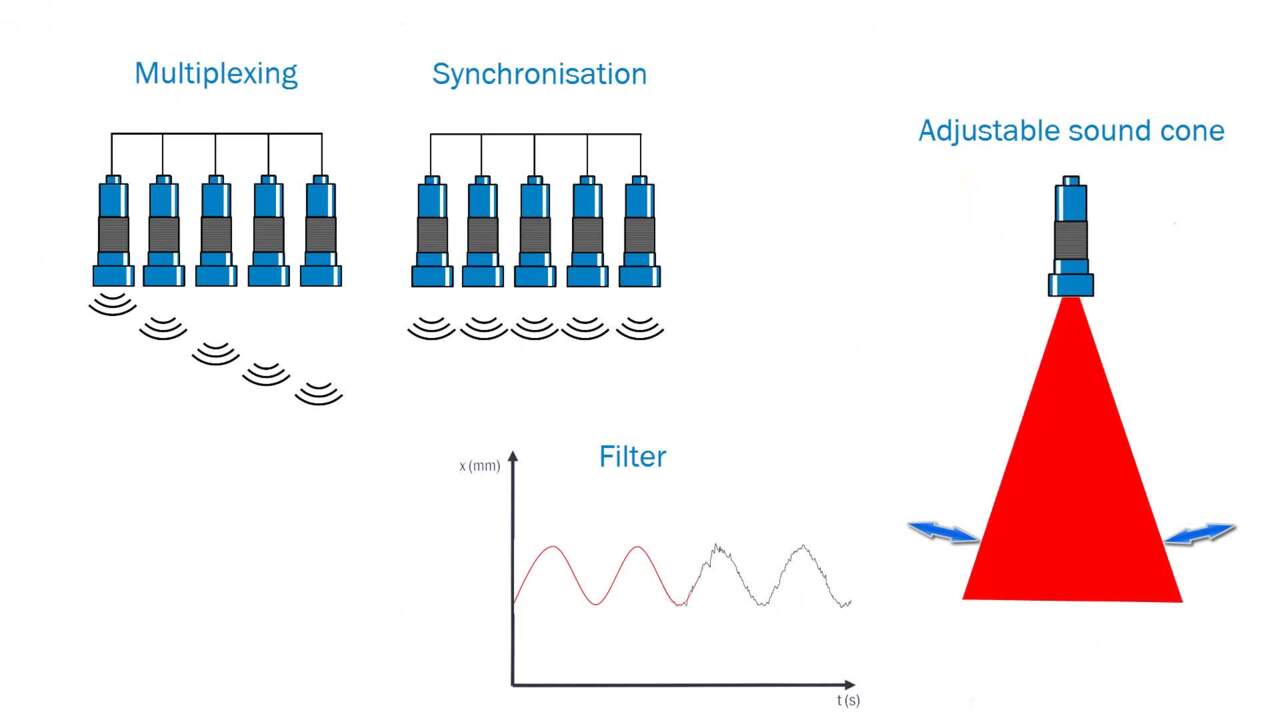
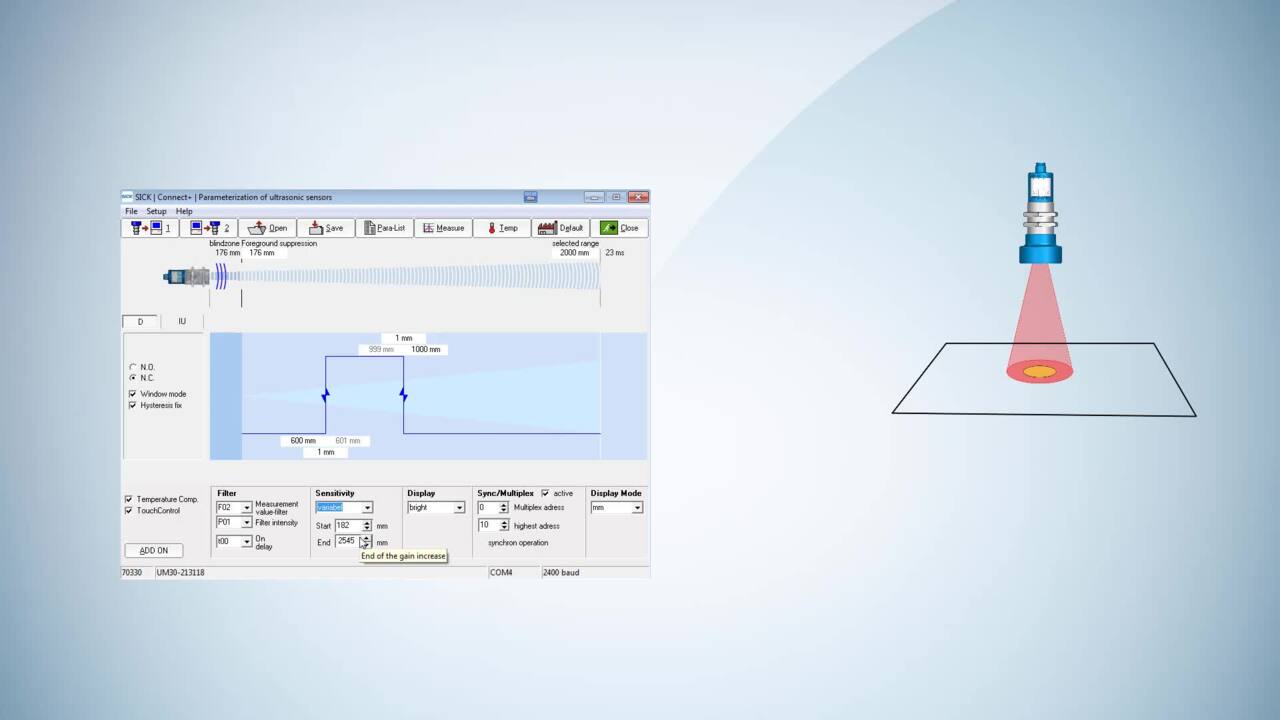
Sensores ultrassônicos
Para objetos a até 8 m de distância, os projetistas podem recorrer a sensores ultrassônicos como a família UM30 da SICK. Esses sensores têm compensação de temperatura integrada para melhorar a precisão da medição e oferecem detecção de objetos independente de cor, imunidade à poeira e operação até +70 °C. Eles medem distâncias com base na tecnologia de tempo de voo, em que a distância é igual à velocidade do som multiplicada pelo tempo total de voo acústico (t2), com o total dividido por 2 (Figura 6).
 Figura 7: os sensores ultrassônicos podem medir a distância com base no tempo total de voo (t2) das ondas sonoras. (Fonte da imagem: SICK)
Figura 7: os sensores ultrassônicos podem medir a distância com base no tempo total de voo (t2) das ondas sonoras. (Fonte da imagem: SICK)
Os sensores ultrassônicos, como o modelo UM30-212111, são adequados para aplicações como o monitoramento de bolsas vazias. Um monitor de temperatura interno produz uma precisão de medição de ±1%. Esses sensores independentes de cor podem detectar objetos difíceis de distinguir, mesmo na presença de sujeira e poeira.
Conclusão
A boa notícia é que há uma grande variedade de opções de tecnologia de sensores de proximidade e distância. Isso significa que há uma solução para cada requisito de aplicação. O desafio é classificar as diversas opções e encontrar a solução ideal para a detecção de materiais específicos em condições reais de aplicação e operação.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.